PID Controllers
PID Controllers provide powerful position and rate control over DC motors, Linear motors, and Solenoids - applications may include Throttle body and e-Wastegate controllers.
PID Block Configuration
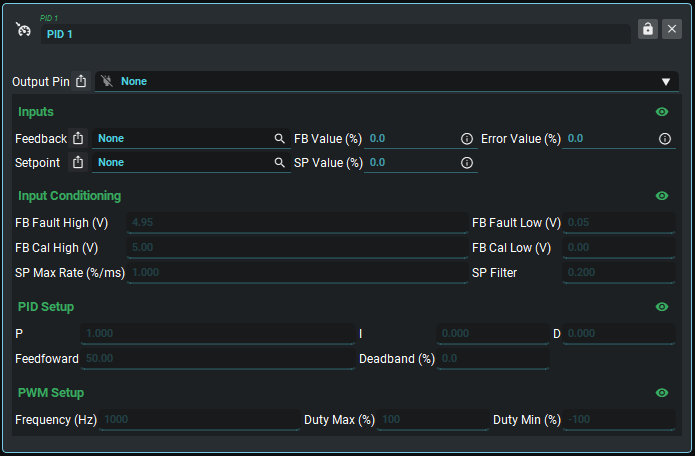
The output pin setting selects the output pin that is to be used.
Inputs
Feedback | PID Feedback input signal. Connect to an input pin, for example, ADIO1 State > Voltage, or a control parameter such as Math Block 1 > Result. Any PDM control parameter may be used. |
FB Value | Monitor the feedback signal value - normalized from 0-100% |
Error Value | Monitors PID target error value - from 0-100% |
Setpoint | PID Setpoint input signal. Connect to an input pin, for example, ADIO1 State > Voltage, or a control parameter such as Math Block 1 > Result. Any PDM control parameter may be used. |
SP Value | Monitors Setpoint signal error value- normalized from 0-100% |
Input Conditioning
FB Fault High | Signals a fault if the feedback input value exceeds 'FB Fault High' |
FB Fault Low | Signals a fault if the feedback input value exceeds 'FB Fault Low' |
FB Cal High | PID feedback (0-100%) is the ratio of 'FB value' as it falls between 'FP Cal High' (100%) and 'FP Cal Low' (0%) |
FB Cal Low | PID feedback (0-100%) is the ratio of 'FB value' as it falls between 'FP Cal High' (100%) and 'FP Cal Low' (0%) |
SP Max Rate | Maximal rate of change allowed on the setpoint input. If the setpoint input rises or falls at a greater rate than specified, then the rate of change is limited by the PID controller. This translates to the level of smoothing noted on the output PWM signal. |
SP Filter | The degree of filtering applied on the setpoint input. |
PID Setup
P, I, D | Proportional, Derivative and Integral gain coefficients. |
Feedforward | Feed-forward gain value |
Deadband | Setpoint deadband. No PID response will be actioned while the change in setpoint is inside the deadband. |
PWM Setup
Frequency | Frequency of PID PWM output signal (Fixed) |
Duty Max | The maximum duty cycle of PID PWM output signal from 0-100% |
Duty Min | The minimum duty cycle of PID PWM output signal from 0-100% |